Publications
Published
2025
- TAC
 Matrix-Scheduling of QSR-Dissipative SystemsSepehr Moalemi, and James R. ForbesIEEE Transactions on Automatic Control (TAC)
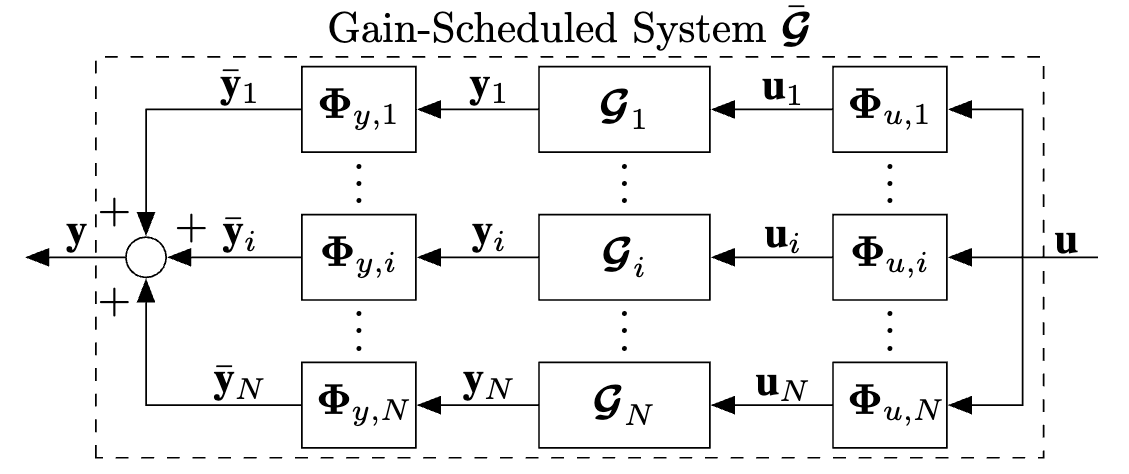
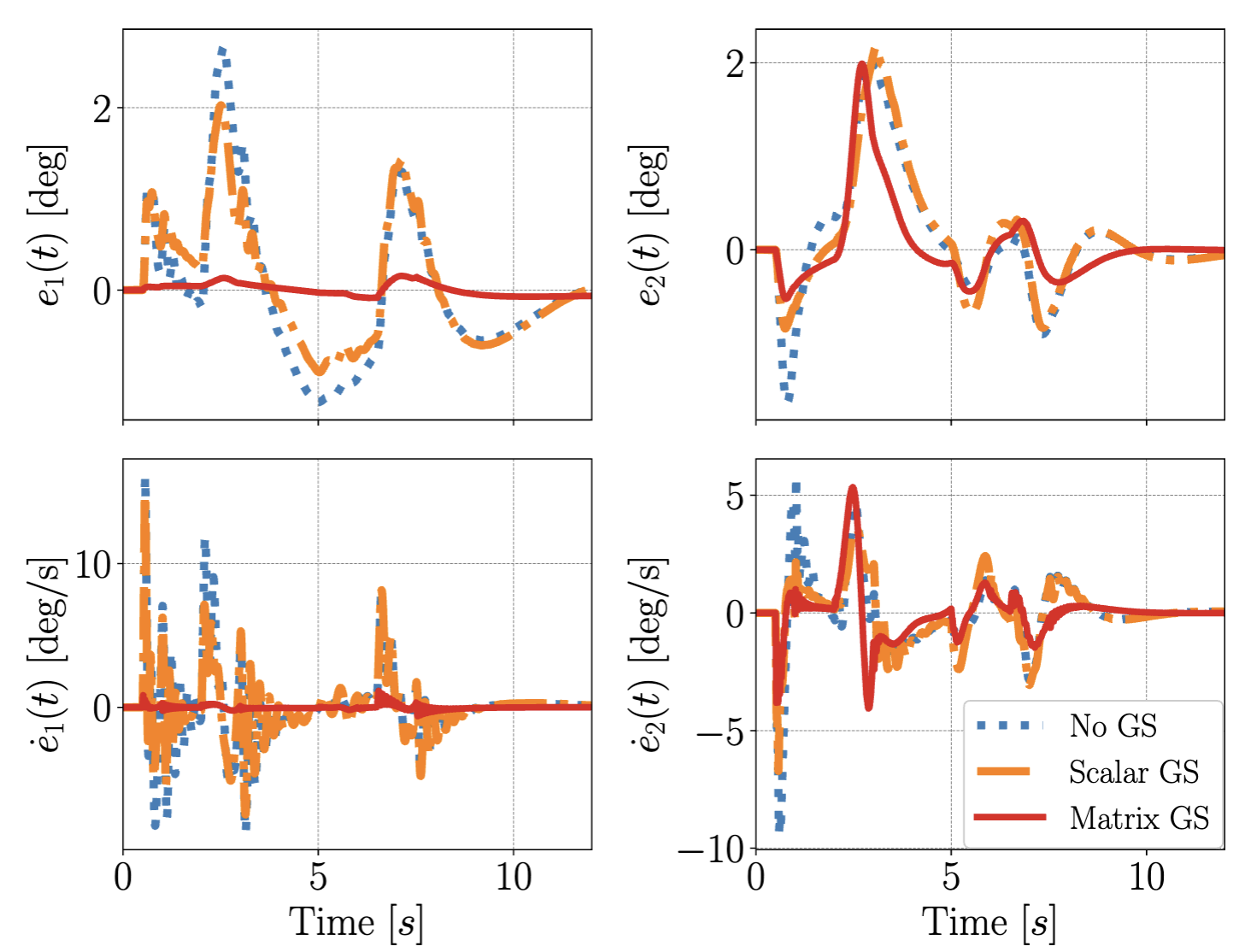
Matrix-Scheduling of QSR-Dissipative SystemsSepehr Moalemi, and James R. ForbesIEEE Transactions on Automatic Control (TAC)This paper considers gain-scheduling of QSR-dissipative subsystems using scheduling matrices. The corresponding QSR-dissipative properties of the overall matrix-gain-scheduled system, which depends on the QSR properties of the subsystems scheduled, are explicitly derived. The use of scheduling matrices is a generalization of the scalar scheduling signals used in the literature, and allows for greater design freedom when scheduling systems, such as in the case of gain-scheduled control. Furthermore, this work extends the existing gain-scheduling results to a broader class of QSR-dissipative systems. The matrix-scheduling of important special cases, such as passive, input strictly passive, output strictly passive, finite \(\mathcal{L}_2\) gain, very strictly passive, and conic systems are presented. The proposed gain-scheduling architecture is used in the context of controlling a planar three-link robot subject to model uncertainty. A novel control synthesis technique is used to design QSR-dissipative subcontrollers that are gain-scheduled using scheduling matrices. Numerical simulation results highlight the greater design freedom of scheduling matrices, leading to improved performance.
@article{moalemi_forbes_qsr_gs_tac, author = {Moalemi, Sepehr and Forbes, James R.}, title = {Matrix-Scheduling of QSR-Dissipative Systems}, journal = {IEEE Transactions on Automatic Control (TAC)}, year = {2025}, volume = {70}, number = {8}, pages = {5286-5300}, doi = {10.1109/TAC.2025.3542329}, } - ACC
 Input-Output Stability of Gradient Descent: A Discrete-Time Passivity-Based ApproachSepehr Moalemi, and James R. ForbesAmerican Control Conference (ACC)
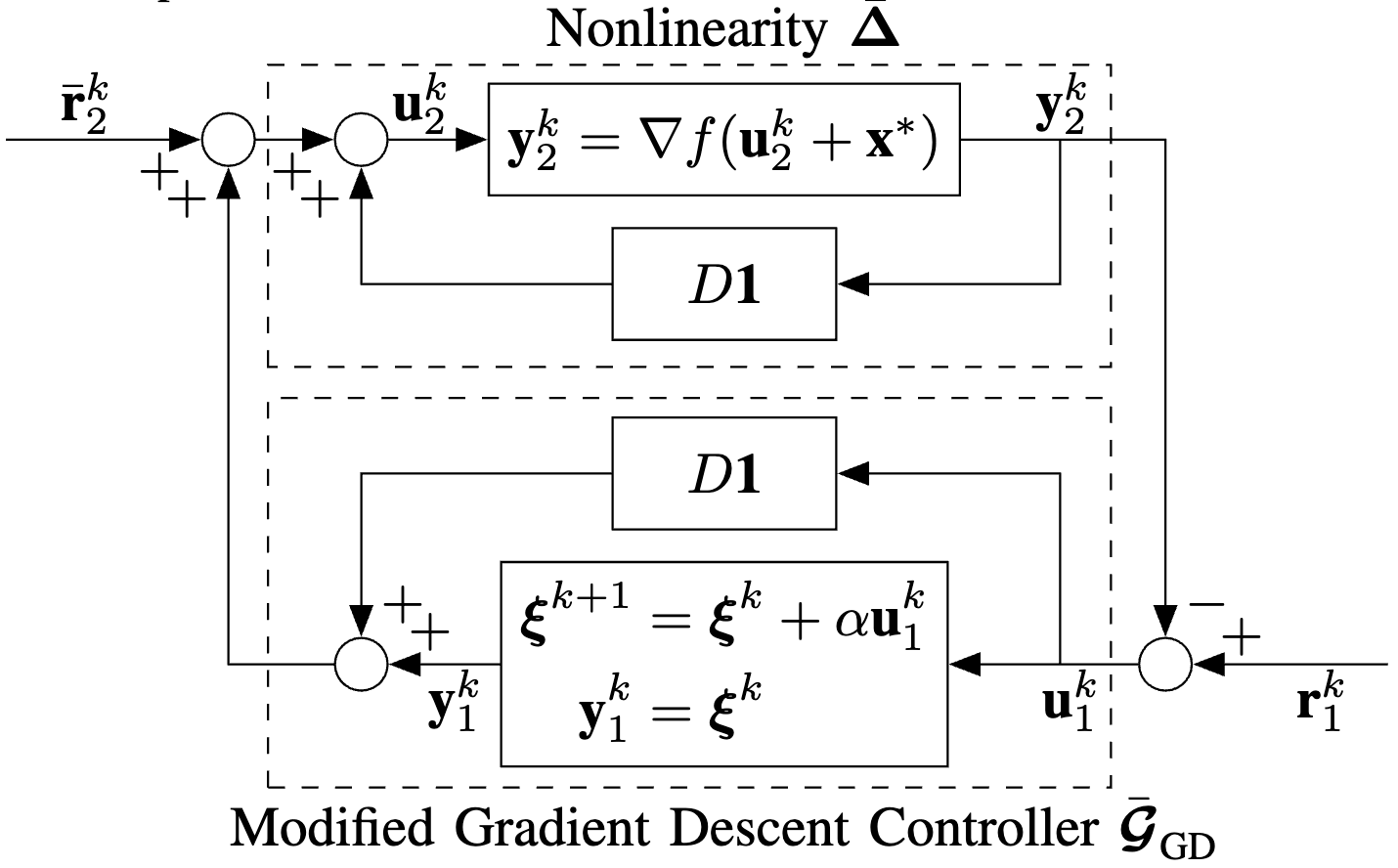
Input-Output Stability of Gradient Descent: A Discrete-Time Passivity-Based ApproachSepehr Moalemi, and James R. ForbesAmerican Control Conference (ACC)This paper presents a discrete-time passivity-based analysis of the gradient descent method for a class of functions with sector-bounded gradients. Using a loop transformation, it is shown that the gradient descent method can be interpreted as a passive controller in negative feedback with a very strictly passive system. The passivity theorem is then used to guarantee input-output stability, as well as the global convergence, of the gradient descent method. Furthermore, provided that the lower and upper sector bounds are not equal, the input-output stability of the gradient descent method is guaranteed using the weak passivity theorem for a larger choice of step size. Finally, to demonstrate the utility of this passivity-based analysis, a new variation of the gradient descent method with variable step size is proposed by gain-scheduling the input and output of the gradient.
@inproceedings{moalemi_forbes_gd_passive_acc, author = {Moalemi, Sepehr and Forbes, James R.}, title = {Input-Output Stability of Gradient Descent: A Discrete-Time Passivity-Based Approach}, booktitle = {American Control Conference (ACC)}, year = {2025}, pages = {924--929}, doi = {10.23919/ACC63710.2025.11107445}, }
2024
- CCTA
 Passivity-Based Gain-Scheduled Control with Scheduling MatricesSepehr Moalemi, and James R. ForbesIEEE Conference on Control Technology and Applications (CCTA)
Passivity-Based Gain-Scheduled Control with Scheduling MatricesSepehr Moalemi, and James R. ForbesIEEE Conference on Control Technology and Applications (CCTA)This paper considers gain-scheduling of very strictly passive (VSP) subcontrollers using scheduling matrices. The use of scheduling matrices, over scalar scheduling signals, realizes greater design freedom, which in turn can improve closed-loop performance. The form and properties of the scheduling matrices such that the overall gain-scheduled controller is VSP are explicitly discussed. The proposed gain-scheduled VSP controller is used to control a rigid two-link robot subject to model uncertainty where robust input-output stability is assured via the passivity theorem. Numerical simulation results highlight the greater design freedom, resulting in improved performance, when scheduling matrices are used over scalar scheduled signals.
@inproceedings{moalemi_forbes_vsp_gs_ccta, author = {Moalemi, Sepehr and Forbes, James R.}, title = {Passivity-Based Gain-Scheduled Control with Scheduling Matrices}, booktitle = {IEEE Conference on Control Technology and Applications (CCTA)}, pages = {7--13}, year = {2024}, doi = {0.1109/CCTA60707.2024.10666540}, }